 新生手册
新生手册 考试介绍
考试介绍 视频讲解
视频讲解 考试安排
考试安排 学历提升
学历提升





不用去学校,就能修名校专科/本科学历,国家承认 学信网可查,查看详情>>>
学习推荐 您现在的位置:历年真题 > 文章内容
您现在的位置:历年真题 > 文章内容
一、单项选择题(本大题共20小题,每小题2分,共40分)
在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内.错选、多选或未选均无分.
1.传统工厂生产布局,要实现FMS、FMC、CIMS等技术改造时,工厂一般的投资规模大小为( )
A.FMS>FMC>CIMS
B.FMS>CIMS>FMC
C.C1MS>FMS>FMC
D.CIMS>FMC>FMS
2.基于教材JB3298—83标准,某数控加工程序为( )
N010 G92 X100 Z195
N020 G90G00 X15 Z150
……
N100 M02
该程序中,最后一个程序段的含义是
A.程序暂停
B.进给停止
C.主轴停止
D.程序结束
3.编程人员在编程时使用的,并由编程人员在工件上指定某一固定点为坐标原点所建立的坐标系称为( )
A.工件坐标系
B.机床坐标系
C.右手直角笛卡尔坐标系
D.标准坐标系
4.采用逐点比较法对第一象限的圆弧进行顺圆插补时,若当前刀具位置的坐标是P(xi,yi),偏差值是Fi,那么刀具沿正X轴方向走一步后,偏差值Fi+1为( )
A.Fi-2xi
B.Fi-2xi+1
C.Fi+2xi
D.Fi+2xi+1
5.数控机床可靠性通常用MTBF表示,其中文含义是( )
A.平均故障时间
B.平均故障间隔时间
C.平均故障修复时间
D.平均寿命时间
6.滚珠丝杠螺母副预紧的主要目的是( )
A.增加阻尼比,提高抗振性
B.提高运动的平稳性
C.消除轴向间隙和提高传动刚度
D.加大摩擦力,使系统能自锁
7.下列有关数控机床机械结构叙述中,正确的说法是( )
A.机床的刚度指的是机床抵抗交变载荷所引起振动的能力
B.影响机床刚度的主要因素是各构件相互间的接触刚度
C.机床的动刚度只与机床的静刚度和阻尼比有关
D.动刚度常作为衡量抗振性的指标
8.顺序选刀方法的优点是( )
A.每把刀具能重复使用
B.刀库的驱动控制简单
C.刀具可以任意存放
D.刀具排列顺序不容易出错
9.速度反馈电路中,"F/V变换器"的作用是( )
A.电压/电流变换
B.电流/电压变换
C.频率/电压变换
D.电压/频率变换
10.由于数控机床进给直流伺服电动机的功率一般较小,通常选用( )
A.永磁式直流电动机
B.并励式直流电动机
C.复励式直流电动机
D.它励式直流电动机
l1.步进电动机转子前进的步数小于电脉冲数的现象称为( )
A.丢步
B.失步
C.越步
D.异步
12.在下列相位比较式进给位置伺服系统的四个环节中,用来接收插补指令脉冲的是( )
A.脉冲/相位变换器
B.鉴相器
C.正余弦函数发生器
D.位置控制器
13.在数控系统中,控制系统送来的控制信号要驱动电动机转动,必须经过( )
A.电压放大
B.电压种类变换
C.电流/电压变换
D.功率放大
l4.数控机床要达到好的动态特性,减小跟随误差,除对进给速度值限制外,还要限制进给系统的( )
A.最大加速度
B.质量
C.滚珠丝杠的直径
D.滚珠丝杠的螺距
15.绝对式脉冲发生器的码道数越多,则其绝对分辨率( )
A.越低
B.越高
C.不变
D.可能高,也可能低
16.感应同步器安装时,一般定、滑尺之间的间隙保持在______范围之内.( )
A.0.20-0.30mm
B.0.10-0.20mm
C.0.05-0.10mm
D.0.30-0.40mm
l7.为了减少传感器热变形对测量精度的影响,应选择传感器的热膨胀系数______机床的热膨胀系数.( )
A.大于
B.小于
C.等于
D.不等于
18.感应同步器用增量型测量系统,如果允许增量脉冲频率为10KHz,脉冲当量为0.01mm,则系统允许的最大跟踪速度为( )
A.5m/min
B.6m/min
C.10m/min
D.30m/min
19.闭环数控机床的定位精度主要取决于( )
A.位置检测系统的精度
B.丝杠的制造精度
C.伺服电机的控制精度
D.机床导轨的制造精度
20.在FANUCl5系统中所采用的高分辨率绝对脉冲编码器,若每转输出脉冲数为100万个,最高允许转速10000转/分.如果将它和导程为10mm的进给滚珠丝杠相连接,那么理论上可以达到的最小位移检测单位是( )
A.0.001μm
B.0.0lμm
C.0.1μm
D.1μm
三、分析题(本大题共4小题,每小题5分,共20分)
31.简述滚珠丝杠螺母副的优点.
32.简述步进电动机驱动电源脉冲功率放大部分的功能.并说出常见的三种类型.
33.试述数据采样式进给位置伺服系统位置功能是如何实现的.
34.以长光栅为例,画出其结构组成示意图并说明莫尔条纹的形成原理.
四、编程题(本大题共10分)
35.如图所示为孔加工工件,a、b、c、d坐标如图所示,今在这四处钻孔,试按照教材中所学的代码格式(JB3298-83)编写其加工程序.已知与要求:
(1)孔的位置为绝对尺寸标注.机床主轴的开、停由数控系统控制,但主轴转速和冷却液的开、关均由手动控制;
(2)机床脉冲当量为0.01mm,尺寸字用脉冲当量表示;
(3)机床原点为图中O-xyz坐标原点,加工前钻头位于机床原点离工件上端面200mm处,Z轴原点设置在工件上表面.加工时钻头快进至a孔位置,并离工件表面150mm.到达a孔位置后钻头以1000r/min转速旋转并向下快进到离工件端面2mm处,然后以200mm/min的速向下进给钻孔,至15mm孔深后快速退回.其余类似a孔加工,加工顺序是a-b-c-d,加工完钻头再返回原位.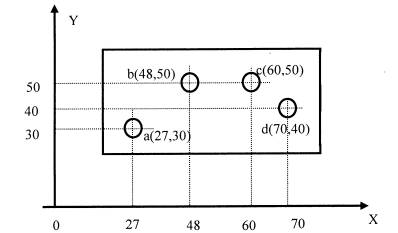
五、计算题(本大题共2小题,每小题10分,共20分)
36.BA是第一象限要加工的圆弧,圆弧的圆心在坐标原点(0,0),圆弧起点坐标为B(0,5),终点坐标为A(5,0),若脉冲当量为1,用逐点比较法对该段圆弧进行顺圆插补.试完成下列问题:
(1)求需要的插补循环数总数;
(2)按下面给定表格形式表述完成插补计算过程,同时把刀具运动位置各点的坐标值求出列入;
(3)在图上画出刀具运动的轨迹.
插补循环
偏差判别
进给方向
偏差计算
刀具运动位
置坐标值
终点判别
0
1
2
测试次数
[1]
转载请注明:文章转载自(http://www.gdzkw.net)